Je remercie Benoît Guy et Aymeric Picaud qui se sont investis dans la mise en ligne de ce sujet.
De plus et pour une meilleure compréhension de la précession des équinoxes, Aymeric Picaud a conçu une belle animation pour illustrer ce phénomène.
« Ce qui est admirable, ce n’est pas que le champ des étoiles soit si vaste, c’est que l’homme l’ait mesuré. » Anatole France.

- Nuit étoilée
- Vincent Van Gogh
Sujet interdisciplinaire Mathématiques / Physique / Astronomie
Niveau : Classes terminales scientifiques et classes préparatoires
Le professeur pourra adapter le niveau de cet exposé au niveau de ses classes sans nuire à la cohérence de cet exposé.
Ainsi par exemple pour déterminer la distance d’une étoile à la terre par la méthode des vitesse radiales, on pourra simplement dire que l’outil vitesse radiale permet cette évaluation approximative.
Notions de mathématiques
| Différentielle d’une fonction à plusieurs variables | prépa / université |
| Calcul vectoriel : dérivation vectorielle et produit scalaire | prépa / université |
| Théorème des 3 sinus | classe de première et plus |
| Fonctions trigonométriques | classe de seconde et plus |
| Approximation de la longueur d’un arc avec la longueur d’un segment porté par la tangente |
classe de seconde et plus |
| Équations du second degré | classe de seconde et plus |
| Théorème de Thalès | collège |
| Théorème de Pythagore | collège |
| Angles correspondants, alternes internes | collège |
| Quadrilatère concave , convexe , croisé | collège |
| Intersection d’une sphère et d’un plan | collège |
Logiciels utilisés :
- Cabri 3d Plugin CABRI 3D à télécharger impérativement
https://cabri.com/en/instructor/cabri-3d/
Avec le plugin Cabri 3d, vous pouvez visualiser les fichiers cabri 3d et manipuler les objets même s’ils ne possèdent pas la licence Cabri 3d.
Utiliser dans ce cas Firefox ou Internet explorer exclusivement. - Stellarium https://stellarium.org/fr/
Sommaire
Introduction
0) Quelques unités utiles en astronomie
1) Les coordonnées écliptiques et équatoriales
2) La précession des équinoxes et la nutation
3) La parallaxe annuelle
4) Vitesse radiale et tangentielle d’une étoile
5) Mouvement propre d’une étoile
6) Expression de la vitesse tangentielle
7) Quelques propriétés relatives au vecteur vitesse radiale
8) Le calcul des coordonnées
9) Une nouvelle application de la notion de vitesse radiale
Note :
4/(0) signifie : paragraphe 4 formule (0)
4/b/(0) signifie : paragraphe 4 ; sous paragraphe b ; formule (0)
4/b/0 signifie : paragraphe 4 ; sous paragraphe b ; sous sous paragraphe (0)
4/P2/(0) signifie : paragraphe 4 ; propriété 2 ; formule (0)
Introduction
À l’échelle d’une vie, on pourra toujours reconnaître les dispositions relatives des étoiles des constellations mais dans 100 000 ans, cette disposition des étoiles les unes par rapport aux autres sera notablement modifiée.
Prenons comme exemple la Petite Ourse :
En bleu Perkhad ($\gamma$ UMi) ; en jaune Kochab ($\beta$ UMi) ; en beige ($\eta$ UMi).
($\zeta$ UMi) est la quatrième étoile du chariot.

- figure 1 En 2018
Le quadrilatère ($\gamma$, $\beta$, $\eta$, $\zeta$) est convexe.

- figure 2 Dans 100 000 ans
Alors que dans 100 000 ans le quadrilatère ($\gamma$, $\beta$, $\eta$, $\zeta$) sera croisé.
Quelle en est la raison ?
Il nous faudra pour le comprendre aborder la notion de mouvement propre d’une étoile.
Nous serons aussi amenés à reparler de la notion de parallaxe annuelle d’une étoile afin de comprendre pourquoi on peut confondre en pratique la distance étoile Soleil et la distance étoile Terre en ne perdant jamais de vue que les étoiles sont à des distances vertigineuses de la Terre, distance que l’on évalue en année lumière (al) ou en parsec.
Le logiciel Stellarium permettra au lecteur de visualiser à une date quelconque les constellations et viendra ainsi en appui à notre propos.
Au carrefour des mathématiques et de l’astronomie brillent de grands savants comme par exemple Halley (1656-1742) pour sa découverte du mouvement propre des étoiles, Bessel (1784-1846) grâce à qui nous avons commencé enfin à connaître les vertigineuses dimensions de la voûte étoilée ou encore Bradley (1693-1762) avec sa découverte de l’aberration et de la nutation.
L’astrométrie, mieux connue autrefois sous le nom d’astronomie de position, est la branche de l’astronomie qui évalue la position, la distance et le mouvement des étoiles et des autres objets célestes.
L’extrême précision due aux satellites Hipparcos d’abord et Gaia ensuite a permis de révolutionner la mesure des paramètres astrométriques des étoiles.
0) Des unités utiles en astronomie

- figure 3
UA est l’abréviation de l’unité astronomique qui correspond à la distance Terre Soleil soit environ 150 millions de km.
AL ou al est l’abréviation d’année lumière, distance parcourue par la
lumière en 1 année.
pc est l’abréviation de parsec ($\approx$ 3,2 al)
Pour convertir les unités astronomiques , on peut aller sur le site suivant :
https://www.unitjuggler.com/convertir-length-de-au-en-ly.html
Puis en déroulant la page choisir l’unité source et l’unité de destination :

- figure 4
1) Les coordonnées écliptiques et équatoriales
a) Les coordonnées écliptiques

- figure 5
Les éléments de référence sont :
- le plan de l’écliptique
- le point vernal $\gamma$
Le plan écliptique intersecte la sphère céleste selon un cercle : l’écliptique. L’équateur céleste et l’écliptique se coupent en deux points dont l’un est le point franchi par le soleil le 20 ou 21 mars. C’est le point vernal.
Le point vernal rétrograde environ à raison de 50,37’’ par an sous l’effet de la précession luni-solaire.
Le point $\gamma$ comme toutes les étoiles a un mouvement apparent de rotation autour de l’axe des pôles.
O désigne le centre de la terre.
(QQ’) est la droite passant par O perpendiculaire au plan de l’écliptique. Elle rencontre la sphère céleste en Q et Q’ appelés pôles de l’écliptique.
Le pôle nord écliptique est celui d’où l’on verrait le soleil progresser dans le sens direct (sens inverse de la marche des aiguilles d’une montre) le long de l’écliptique.
(PP’) est la droite passant par O et perpendiculaire au plan de l’équateur céleste. P représente le pôle nord céleste. Si l’on était placé au pôle nord, nous verrions tourner la terre dans les sens direct, c’est-à-dire le sens inverse de la marche des aiguilles d’une montre.
Dans ce système de coordonnées, la direction d’un astre est définie par :
- sa longitude écliptique de 0° à 360°.
- sa latitude écliptique b variant de - 90° à 90° (positive dans l’hémisphère contenant le pôle nord écliptique.
L’obliquité de l’écliptique $\epsilon$ vaut 23°27‘ : c’est l’angle entre l’équateur céleste (prolongement sur la sphère céleste de l’équateur terrestre) et le plan de l’écliptique. Nous préciserons dans l’exposé cette notion liée aux plans fondamentaux que sont l’équateur et l’écliptique.
Tout se passe pour l’observateur terrestre comme si la sphère céleste représentée ci-dessus tournait autour de lui, la durée de cette rotation étant de 23 h 56 min 4 s.
Les étoiles comme le point vernal sont entraînés dans ce mouvement apparent de la sphère céleste.
b) Les coordonnées équatoriales

- figure 6
La direction d’un astre est caractérisée par :
- son ascension droite $\alpha$,
- sa déclinaison $\delta$.
La déclinaison se mesure en degrés entre -90° et 90° positive au dessus de l’équateur, négative en dessous.
L’ascension se mesure en heures minutes et secondes.
1 heure d’ascension droite vaut 15°.
Le demi grand cercle contenant la direction de l’étoile semble faire un tour en 23 h 56 min 4 s.
L’ascension droite se mesure dans le sens direct.
L’ascension droite et la déclinaison sont invariables en première approximation.

- figure 7
- crédit : Astrophysique sur mesure/Patrick Rocher
On pourra utiliser l’application interactive GEOGEBRA du CRAL :
https://cral.univ-lyon1.fr/labo/fc/astrogebra/reperage/systemes.html

- figure 7 bis
2) La précession des équinoxes et le phénomène de nutation.
La Terre possède un axe de rotation instantané et un axe moyen qui fait un angle de 23° 27’ environ avec la normale à l’écliptique passant par le centre de la Terre. L’axe moyen décrit un cône en environ 26000 ans et définit un plan équateur moyen de même que l’axe de rotation instantané définit un plan équateur instantané que l’on appelle équateur vrai.
L’axe moyen décrit ce cône dans le sens rétrograde et fait que le point vernal moyen, l’une des intersections de l’équateur moyen avec le plan de l’écliptique rétrograde environ de 50’’ par an.
La Terre n’est pas sphérique et homogène et possède un bourrelet équatorial sur lequel le Soleil, la Lune et les autres planètes exercent leur influence qui génère ce mouvement de précession de l’axe instantané de rotation .

- figure 8
- crédit : ASM/ Patrick Rocher
Voir l’animation precession.ggb du site :
https://cral.univ-lyon1.fr/labo/fc/astrogebra/astrogebra.htm


- figure 9
- en réalité, le plan de l’écliptique varie dans le temps ainsi que l’obliquité
En ce qui concerne la Terre, une propriété importante de l’obliquité est la variation cyclique de sa valeur : celle-ci varie entre 24,5044° (ou 24°30’16« ) et 22,0425° (ou 22°2’33 ») suivant un cycle de 41000 années qui est l’un des cycles de la théorie astronomique du climat de l’astronome et géophysicien Milankovitch.

- figure 10
- « Sous les feux du soleil » de J. Bornaret et J. Lilensten
| Voir l’animation proposée par Aymeric Picaud de MathémaTICE : |
Animation 11 : Cercle de précession
animation montrant l’évolution de l’inclinaison des pôles à chaque équinoxe. Le pôle Nord décrit un cercle sur la sphère céleste : le cercle de précession.
Aymeric Picaud
|
Sur la précession, Jean Souchay astronome à l’Observatoire de Paris nous donne quelques précisions :
« Au mouvement de précession connu depuis l’Antiquité viennent s’ajouter de petites oscillations que l’on appelle la nutation. Il faudra attendre le XVIIIème siècle pour que celle-ci soit mise en évidence par l’observation, grâce à un astronome anglais, James Bradley (1693-1762).
La précession et la nutation de la terre s’expliquent par un même phénomène, l’influence conjuguée de la Lune et du Soleil sur le bourrelet équatorial de la Terre : le couple gravitationnel exercé par ces deux corps célestes sur le bourrelet s’accompagne d’un mouvement de balancement de l’équateur et donc déplace l’axe des pôles qui lui est perpendiculaire, dans l’espace. On doit à Newton, dans son Livre I des Principia, d’avoir expliqué le premier l’origine gravitationnelle de la précession.
En 1749 D’Alembert calcule le couple perturbateur lunisolaire sur tout le bourrelet équatorial. Pour cela il fait appel au calcul intégral, précieux outil mathématique qu’il a lui-même contribué à développer. Rapidement, il obtient les équations du mouvement du pôle de la terre dans l’espace et peut ainsi d’une part retrouver en la quantifiant la précession des équinoxes, d’autre part prouver et déterminer en détail le mouvement de nutation, découvert deux ans auparavant »
En 1765, Euler montre que si l’axe d’inertie d’un corps et l’axe de rotation d’un corps ne sont pas confondus, alors l’axe de rotation décrit un cône autour de l’axe du plus grand moment d’inertie d’angle 0,009’’.
L’axe de rotation instantané oscille autour de l’axe moyen qui décrit un cône de 18,4’’ d’angle au sommet en 18,6 ans.
On appelle ce phénomène la nutation qui est due à la variation du plan orbital de la lune et qui ajoute une légère oscillation à la précession des équinoxes.
L’axe instantané de rotation est appelé axe vrai.
L’axe moyen de rotation décrit un cône d’angle au sommet très lentement variable puisque cette inclinaison perd environ 0,4680‘’ par an soit environ 46’’ par siècle.
Dans le cas de la Terre, cet angle était de 23° 26’ 13,022" (ou 23,4369506480°) au 1er janvier 2018. On parle d’obliquité moyenne $\varepsilon_0$ si l’on ne tient pas compte de la nutation et d’obliquité vraie $\varepsilon$ dans le cas contraire.
3) La parallaxe annuelle : un problème d’extremum
E désigne l’étoile S le soleil T la terre
a la projection de E sur le plan de l’écliptique
A et B les points de contact des deux tangentes issues de e au cercle rouge de l’orbite terrestre

- figure 12
D’après la relation des trois sinus on a : $\dfrac{\sin \widehat{\text{TES}}}{a} = \dfrac{\sin \widehat{\text{ETS}}}{\text{ES}}$
Donc $\sin \widehat{\text{TES}} = \dfrac{\text{a}}{\text{ES}}\times\sin \widehat{\text{ETS}}$ et $\widehat{TES}$ est maximum si $\sin \widehat{\text{TES}}$ est maximum, ce qui se produit si $\sin \widehat{\text{ETS}} = 1$ c’est-à-dire si $\widehat{ETS} =90^{\circ}$.
Posons alors : $\widehat{TES} = p$
Dans ce cas puisque $p$ peut être confondu avec $\tan p$ si $p$ en rad, alors :
$p \approx \dfrac{\text{a}}{\text{ET}}$.
Un raisonnement élémentaire aboutit à ce que seuls ces deux points réalisent le maximum.
La parallaxe $p$ de l’étoile est cette valeur maximum de la mesure de l’angle E. On l’appelle la parallaxe annuelle.
On peut aussi obtenir la parallaxe si l’on est dans la disposition ou l’angle droit est au Soleil.
Il suffit de prendre le plan perpendiculaire à la droite (eS) en S.
Ce plan intersecte le plan de l’écliptique selon la droite (FG).

- figure 13
Si T vient en F ou G , on a dans ce cas $\sin \widehat{TES} = \dfrac{\text{a}}{\text{ET}}$ or $\sin p \approx p$ si $p$ en rad donc :
$\widehat{TES} = \dfrac{\text{a}}{\text{ET}}$ et par conséquent $\widehat{TES} = p$
Conclusion : la parallaxe peut être calculée avec l’angle droit à la terre ou l’angle droit au soleil.
Cette parallaxe n’a jamais pu être mesurée car la parallaxe des étoiles ne dépasse pas 1 seconde d’arc , mesure qui n’était pas réalisable avec les instruments optiques dont on disposait au dix-huitième siècle.
L’unité de mesure des parallaxes : le parsec
Si on mesure la parallaxe annuelle en seconde d’arc et la distance en parsec, on a la relation très simple liant ces deux quantités :
$d = \dfrac{1}{p}$
Par définition, une distance de 1 parsec (pc) est la distance de laquelle on voit le demi grand axe de l’orbite terrestre (1 UA) sous un angle de une seconde d’angle. Pour un angle de parallaxe de $p’’$ seconde d’angle, la distance sera $d$ parsecs.

- figure 14
AB = rayon équatorial , E est l’étoile.
AB =1 UA, $\widehat{\text{ADB}} = 1’’$, $\widehat{\text{AEB}} =p’’$, $\text{BD} = 1 \text{parsec}$.
Cherchons $\text{BE} = d$ en parsecs.
$$\dfrac{1 \text{UA}}{ 1 \text{pc}} = \tan (1’’)$$
$$\dfrac{1 \text{UA}}{ d \text{pc}} = \tan (p’’)$$
$$d = \dfrac{\tan (1’’)}{\tan (p’’)}$$
Comme les angles sont très petits, on peut confondre les tangentes et les angles exprimés en radians.
On a : $d = \dfrac{1}{p}$ où $d$ est donc en parsecs et $p$ en secondes d’angle.
L’héliomètre de Fraunhofer a été utilisé par Bessel en 1837-1838 pour mesurer la parallaxe de l’étoile 61 Cygni et trouver ainsi sa distance au soleil (à la terre).
Mesures de parallaxes depuis l’espace : l’avantage est qu’il n’y a pas d’agitation atmosphérique et pas de réfraction atmosphérique.

- photo 15
- le satellite Gaia

- photo 16
- Bessel (1784-1846)
4) Vitesse radiale et vitesse tangentielle d’une étoile
Le référentiel de Kepler utilisé est centré sur le Soleil et ses axes pointent vers trois étoiles lointaines.

- figure 17
Le référentiel centré sur la Terre (géocentrique) est un référentiel en translation par rapport au référentiel de Kepler au cours de la révolution de la Terre autour du Soleil.
À l’instant t, l’étoile E à une vitesse $\overrightarrow{V_{S}}$ par rapport au Soleil que l’on projette sur la ligne de visée observateur / étoile. Cette projection s’appelle la vitesse radiale de l’étoile notée $\overrightarrow{V_{r}}$. $\overrightarrow{V_{t}}$ est la vitesse tangentielle orthogonale à la ligne de visée.
La spectroscopie nous a montré comment déterminer la vitesse radiale de
l’étoile Arcturus dans l’article intitulé :
« La lumière messagère des étoiles : la distance Terre Soleil ».
Avec pour corollaire la détermination de la vitesse orbitale de la Terre et la distance Terre-Soleil.
Notons que la trajectoire de l’étoile dans ce référentiel considéré galiléen est une droite avec un vecteur vitesse constant $\overrightarrow{V_{S}}$ sauf si sa trajectoire venait à être perturbée par la rencontre avec un corps massif.
Son expression peut être connue grâce à ce que l’on appelle le mouvement propre $\mu$ de l’étoile et sa distance au moment de l’observation et fait l’objet du paragraphe 5.
5) Mouvement propre d’une étoile

- photo 18
- HALLEY (1656-1742)
C’est Halley qui en 1718 remarqua le mouvement propre des étoiles brillantes depuis l’époque d’Hipparque, déplacement qui se superposait à l’effet de précession des équinoxes.
La précession des équinoxes est évoquée dans le paragraphe 12 de mon sujet intitulé : « Mesures historiques d’Hipparque ».
Nous allons expliquer ce que ce mouvement propre signifie mais après avoir préalablement défini certaines notions.
a) Position héliocentrique d’une étoile sur la sphère céleste géocentrique et héliocentrique

- figure 19
e désigne la position de l’étoile E sur la sphère céleste héliocentrique
Par T centre de la Terre, nous menons la parallèle à la droite (Se) , S désignant le centre de la sphère céleste héliocentrique dont le centre est le centre du Soleil.
Mettre le pointeur de la souris sur T et déplacer T sur l’orbite terrestre.
Alors , si l’on fait tourner la Terre autour du Soleil, le point e’ garde une position fixe sur la sphère céleste géocentrique si toutefois l’étoile e est sans mouvement sur la sphère céleste héliocentrique.
Ce mouvement sur la sphère héliocentrique s’appelle le mouvement propre de l’étoile.
Comme la Terre va effectuer un mouvement de translation sur l’écliptique, la droite (Te’) gardera une direction constante entre deux positions, celle de la droite (eE).
Rajoutons à l’image précédente la position e’’ de l’étoile par rapport à la sphère céleste géocentrique.

- figure 20
Nous pouvons constater que ce point e’’, sur la sphère céleste géocentrique, va évoluer sur l’ellipse de la figure 21.
{kind=link}
Cette ellipse est appelée l’ellipse parallactique.
→ Compte tenu des dimensions en jeu, les deux sphères sont indiscernables.

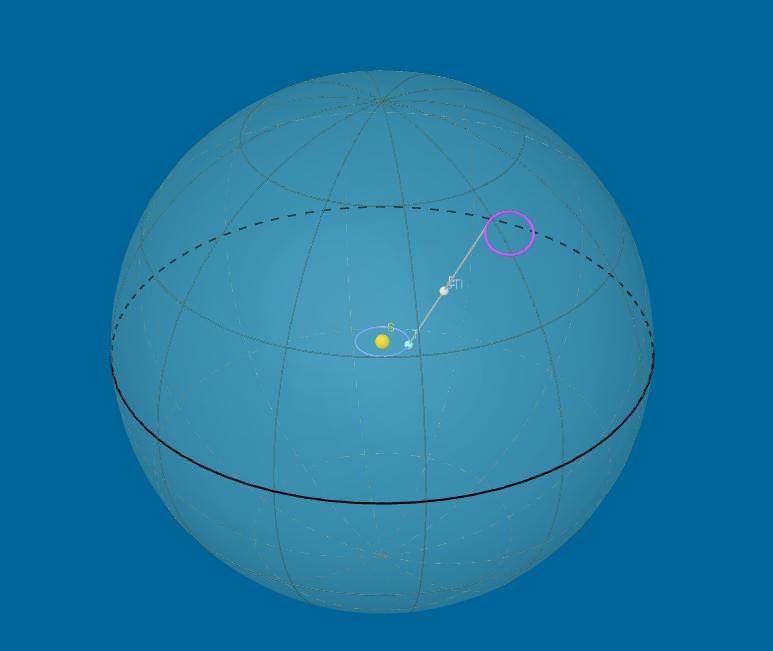
- figure 21
- l’ellipse parallactique sur la sphère héliocentrique
https://cral.univ-lyon1.fr/labo/fc/astrogebra/astrogebra3D.htm
Pour faire fonctionner l’animation, cliquer sur :
Le point en jaune est le Soleil, le point en bleu représente la Terre.
Le point en blanc représente l’étoile dont la projection en mauve sur la sphère céleste décrit l’ellipse en mauve au cours de la translation annuelle de la Terre.
Les deux sphères étant pratiquement confondues, cette ellipse est aussi la trajectoire de l’étoile e’’ sur la sphère céleste géocentrique.
Ainsi, travailler sur la sphère céleste héliocentrique ou encore sur la position héliocentrique de l’étoile sur la sphère géocentrique permet de s’affranchir de la translation de la Terre autour du Soleil.
Un peu de vocabulaire :
Les coordonnées moyennes d’une étoile sont celles de sa position héliocentrique par rapport au système de coordonnées utilisé à une époque précisée et déterminé par les plans fondamentaux suivants :
- Le plan équateur moyen perpendiculaire à l’axe moyen.
- La ligne des équinoxes définie par l’intersection du plan de l’écliptique à
l’instant t et du plan équateur moyen.
Le point vernal (V sur la figure 21 bis) est l’un des deux points de cette intersection. Il correspond au nœud ascendant du Soleil qui franchit ce point vers le 20 ou 21 mars.
{kind=link}
Ce point correspond à l’équinoxe de printemps. L’autre point correspond à l’équinoxe d’automne.
Cette intersection s’appelle l’équinoxe moyen.

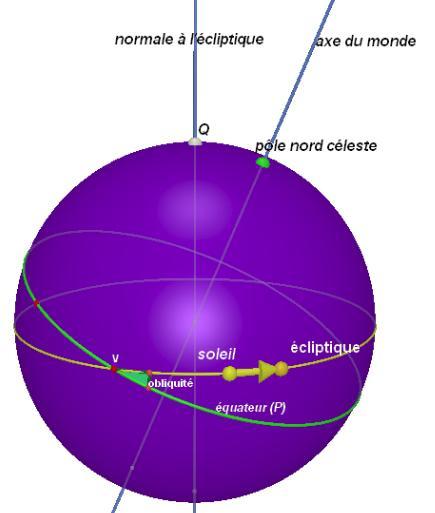
- figure 21 bis : la sphère céleste géocentrique
L’obliquité de l’écliptique est l’angle entre le plan équateur et le plan écliptique (en vert sur la figure 21 bis) ou encore l’angle entre leurs normales respectives.
Le point Q est le pôle Nord écliptique.
Il y a différentes sortes de pôle comme le pôle géographique issue de l’ellipsoïde de référence qui permet de cartographier la terre, le pôle instantané et le pôle moyen.
→ Par souci de ne pas surcharger l’exposé, nous supposerons ces trois pôles confondus.
Le pôle Nord céleste étant dans ce cas le prolongement sur la sphère céleste du pôle Nord géographique.
Si l’on se place sur le pôle Nord céleste, on voit le Soleil parcourir l’écliptique dans le sens direct.
L’époque standard est : J2000.0 = 1er janvier 2000 à 12h UT
Les coordonnées moyennes sont fournies par les catalogues d’étoiles.
Pour comprendre le symbole UT Voir le paragraphe de mon article :
« Fuseaux horaires »
b) Rayon du cercle intersection d’une sphère et d’un plan
Considérons la sphère de centre T et de rayon R. En gris le plan (P).
(ET) une droite perpendiculaire en T au plan (P). Par E, on mène un plan parallèle à (P) qui coupe la sphère selon un cercle de centre E et de rayon r.
L’intersection d’une sphère par un plan est un cercle. Calculons le rayon r de ce cercle en fonction de l’angle $\widehat{\text{ATA’}}$ qui jouera le rôle de la déclinaison à l’étape du paragraphe suivant 5/c.

- figure 22
On a dans le triangle ATE rectangle en E $\quad \sin \widehat{\text{ATE}} = \dfrac{\text{AE}}{\text{AT}}$
donc $\cos \widehat{\text{ATA’}} = \dfrac{r}{R}$ d’où $r = R \cos \widehat{\text{ATA’}} \quad$ (1)
c) Mouvement propre en déclinaison et en ascension
Halley en 1718 découvre le mouvement propre des étoiles.

- figure 23
n désigne le pôle nord céleste et e la position héliocentrique de l’étoile sur la sphère céleste géocentrique.
Les cercles en blanc désignant les méridiens célestes de e et e’ .
Le cercle vert passant par e étant dans un plan parallèle au plan de l’équateur céleste.
Appelons $\alpha$ l’ascension de l’étoile et $\delta$ sa déclinaison.
Soit e la position initiale de l’étoile et e’ sa position au bout d’un an.
On appelle mouvement propre $\mu$ de l’étoile la mesure de l’arc $\overset{\frown}{\text{ee’}}$ parcouru pendant 1 an. Les mouvements propres n’excèdent pas 10,5 secondes d’arc.
Le mouvement propre $\mu_{\alpha}$ en ascension est la mesure de l’arc $\overset{\frown}{\text{eg}}$ précédée de + si l’ascension de l’étoile croît et de - dans le cas contraire.
Le mouvement propre $\mu_{\delta}$ en déclinaison est la mesure de l’arc $\overset{\frown}{\text{ge’}}$ précédée de + si la déclinaison de l’étoile croît et de - dans le cas contraire.
Le triangle sphérique ege’ est un petit triangle sphérique droit assimilable à un triangle plan compte tenu de la petitesse des angles sphériques en jeu.
On peut lui appliquer le théorème de Pythagore.
Nous allons montrer que
$$\mu^2 = \mu^2_{\delta} + \mu^2_{\alpha’}$$
avec
$$\mu_{\alpha’} = \mu_{\alpha} \cos \delta$$
D’après 5/b/(1) Le cercle du rayon rouge a pour rayon $R \cos\mu_{\delta}$.
Jusqu’à nouvel ordre, les mesures sont exprimées en radian.
$longueur \overset{\frown}{\text{eg}} = \mu_{\alpha} \times R \cos \delta$
$longueur \overset{\frown}{\text{e’g}} = \mu_{\delta} \times R$
$longueur \overset{\frown}{\text{e’e}} = \mu \times R$
D’après le théorème de Pythagore, on a :
$\left( \mu \times R\right)^2 = \left( \mu_{\alpha} \times R \cos \delta\right)^2 + \left( \mu_{\delta} \times R\right)^2$
d’où : $ \mu^2 = \mu_{\delta}^{2} + \mu_{\alpha’}^{2}$ avec $\mu_{\alpha’} = \mu_{\alpha} \cos \delta$
Cette fois-ci, $ \mu$ $ \mu_{\delta} $ $ \mu_{\alpha’}$ sont exprimés dans une unité quelconque.
Ce mouvement propre des étoiles est à l’origine de l’évolution extrêmement lente de la disposition des étoiles les unes par rapport aux autres.
d) Le mouvement propre combiné au mouvement de translation de la Terre
Voir l’animation sur le site de l’OBSPM en déroulant la page suivante : https://media4.obspm.fr/public/ress...

- figure 24
6) Expression de la vitesse tangentielle
a) Arc de cercle et tangente
Nous allons à présent comparer la longueur de l’arc de cercle $\overset{\frown}{\text{GT}}$ à la longueur du segment [BT] porté par la tangente en T au cercle de centre O.

- figure 25
Posons $x=\text{BT}$ et $y=\overset{\frown}{\text{GT}}$ et $\alpha = \widehat{\text{GOT}}$
Nous travaillons avec des angles qui sont très petits : on verra ultérieurement lorsque nous parlerons des mouvements propres les raisons pour lesquelles ils n’excèdent pas 10,5".
De sorte que : $\tan \alpha = \dfrac{\text{BT}}{\text{OT}} \approx \alpha$, $\alpha$ exprimé en radians.
$longueur \overset{\frown}{\text{GT}} = \text{OT} \alpha$ avec $\alpha$ en radians.
Et donc : si $\alpha$ est très petit $\text{BT}\approx longueur \overset{\frown}{\text{GT}}$
b) Formule de la vitesse tangentielle
Les distances des étoiles sont vertigineuses, ce qui va amener à faire certaines approximations.
Nous considérons l’étoile e sur la sphère céleste de rayon sa distance réelle.
V est km/s donc en 1 s l’étoile parcourt la distance Ae = V en km.
Elle parcourt la droite en bleu turquoise par rapport au soleil à la vitesse V et donc sa projection sur la sphère céleste parcourt le cercle en turquoise, intersection du plan déterminé par la droite en turquoise et la sphère céleste.

- figure 26
L’angle $\widehat{\text{aOe}}$ est très petit : par exemple l’étoile la plus rapide a un mouvement propre de 10,5 seconde d’arc par an.
La plupart des étoiles ont un mouvement propre inférieur à la seconde d’arc.
Nous indiquons par → les endroits où nous faisons les approximations qui s’imposent.
→ De sorte que d’après le [bleu ciel]6/a[/bleu ciel] le segment $[\text{eb}]$ et l’arc $\overset{\frown}{\text{ae}}$ peuvent être confondus.
La droite (AB) est perpendiculaire à (OB) et la tangente en e l’est aussi.
Nous pouvons donc appliquer le théorème de Thales aux triangles AOB et beO.
Or la connaissance des vitesses des étoiles nous permet de dire que :
→ $V/d \approx 0 \quad V/d \approx 0 \quad \text{ et donc } \text{Oe} \approx \text{OB}$
$\dfrac{\text{Oe}}{\text{OB}} = \dfrac{\text{be}}{\text{AB}}$, $1 \approx \dfrac{\text{be}}{V_{t}}$ et donc $\text{be} \approx V_{t}$
Le vecteur $\overrightarrow{V_t}$ est donc le vecteur vitesse de e sur cette sphère céleste.
Au bout d’un an l’étoile est en e’.
Appelons n le nombre de secondes en 1 an :
$$n = 3600\times 24 \times 365,25 \approx 31,56 \times 10^{6}\text{ s}$$
$$longueur \overset{\frown}{\text{ee’}} = n \times V_{t}$$
Puisque $V_{t}$ est en km/s et n en secondes, la longueur est exprimée en km.
Supposons que la mesure de $\widehat{\text{e’Oe}} = \mu \text{rad}$.
$longueur \overset{\frown}{\text{ee’}} = d\mu$ avec $d$ distance de l’étoile en km.
Faisons intervenir la parallaxe $p$ de l’étoile :
$p = \dfrac{1 \text{UA}}{d} \quad$ avec 1 UA exprimée en km puisque d est exprimé en km.
D’après le paragraphe 0 sur les unités utilisées en astronomie :
$1UA = 150 \times 10^6$ km.
Il vient :
$$V_{t} = 4,74 \cdot \dfrac{\mu}{p} \quad\color{blue}\textbf{(1)}$$
Formule dans laquelle $\mathbf{\mu}$ et $\mathbf{p}$ n’ont plus à être exprimés en radian mais seulement à l’aide de la même unité, par exemple la seconde d’arc. $V_t$ est exprimé en km/s
Or d’après le paragraphe 3 sur la parallaxe :
$d = \dfrac{1}{p}$ où $d$ est donc en parsecs et $p$ la parallaxe en secondes d’angle.
Donc :
$$V_t = 4,74 \cdot \dfrac{\mu}{p} \quad\color{blue}\textbf{(1)}$$
Avec $\mu$ en secondes d’arc/an, $d$ en parsec et $V_t$ en km/s.

- figure 27
- Proper motion = mouvement propre
- Transverse velocity = vitesse tangentielle
- Radial velocity = vitesse radiale
$$V^{2} = V_{r}^{2} + V_{t}^{2} \quad \color{blue}\textbf{(1)}$$
7) Quelques propriétés du vecteur vitesse radiale
Propriété 1 :
Le vecteur vitesse radiale de l’étoile par rapport au soleil est le même que l’on prenne comme ligne de visée :
La droite Soleil/étoile ou la droite observateur/étoile.
Démonstration :
La parallaxe d’une étoile ne dépasse pas 0,8 seconde d’arc.
C’est à peu près la parallaxe de Proxima du Centaure, l’étoile la plus proche de nous.
Appelons $\overrightarrow{u}$ un vecteur unitaire dirigé de T vers E et $\overrightarrow{v}$ un vecteur unitaire dirigé de S vers E. Désignons par S le Soleil, T la Terre ou l’observateur et E l’étoile.
$(\overrightarrow{u},\overrightarrow{v}) = (\overrightarrow{TE},\overrightarrow{SE}) \approx 0$
Appelons A et B les projections orthogonales respectives de $\overrightarrow{Vs}$ sur (ET) et (St).
Posons $\overrightarrow{EA} = \overrightarrow{Vr}$
et $\overrightarrow{EB} = \overrightarrow{V’r}$
$ \overline{EA} = \overrightarrow{Vs} \cdot \overrightarrow{u} \quad \overline{EB} = \overrightarrow{Vs} \cdot \overrightarrow{v} = \overrightarrow{Vs} \cdot \overrightarrow{u}$ alors $ \overline{EA} = \overline{EB} $ et donc A = B.
Nous en déduisons $\overrightarrow{Vr} = \overrightarrow{V’r}$.
Propriété 2 :
Le vecteur vitesse radiale d’une étoile par rapport au soleil reste approximativement constant si l’échelle de temps n’est pas trop grande.
Essayons de préciser à travers un exemple - qui envisage comme intervalle de temps un siècle - la phrase « si l’échelle de temps n’est pas trop grande ».

- figure 28
Par rapport au soleil S, la trajectoire de l’étoile E est une droite parcourue à la vitesse V. Au bout d’un siècle, elle est en E’.
$V_t$ désigne sa vitesse tangentielle et $V_r$ sa vitesse radiale.
On sait que le triangle EAB est droit en A. (revoir le paragraphe 4 sur la définition de la vitesse tangentielle et de la vitesse radiale) .
Posons $\theta = \widehat{\text{BEA}} \quad \tan \theta = \dfrac{V_t}{V_r}$
Prenons l’exemple de Proxima du Centaure. Le raisonnement s’appliquerait à toute autre étoile comme par exemple l’étoile Sirius qui est prise en exemple dans le classeur EXCEL qui suit.
Mouvement propre $\mu$ = 3,673 seconde d’arc/an
distance = 4,4 al =1,34905 parsec
$\mathbf{V_r=-} 21,6\text{ km/s}$
D’après 6/b/[bleu](2)[/bleu] on a $V_t = 4,74 \mu d$ d’où $\mathbf{V_t} \approx 23,5\text{ km/s}$
$\tan \theta = \dfrac{V_t}{V_r}$ d’où $\theta \approx 47,5^{\circ}$
D’après 6/b/(3) $V_{S}^{2} = V_{r}^{2} + V_{t}^{2} \quad$ d’où $V \approx 32\text{ km/s} \approx 3,26 \times 10^{-5} \text{pc/an}$
Calculons EE’ en parsec sur 1 siècle : $\text{EE’} = 100 \times 3,26 \times 10^{-5} = 0,00326\text{ pc}$
Le théorème d’Al Kashi appliqué au triangle EE’S donne $\text{SE’} \approx 1,34684$
Posons $y = \widehat{\text{EE’S}}$
Appliquons le théorème des trois sinus au triangle EE’S.
$\dfrac{\sin y°}{1,34905} = \dfrac{\sin 47,5°}{1,34684}$
On trouve $y \approx 47,6°$
Le module du nouveau vecteur radiale en km/s vaut $32 \times \cos(47,6°) \approx 21,56$.
C’est une valeur très proche de 21,6 km/s.
Plus on considérera des périodes de temps importantes et plus la vitesse radiale verra sa valeur se dégrader comme on pourra le constater à l’aide du classeur EXCEL intitulé « Évolution de la vitesse radiale »
On essaiera avec le classeur Excel de constater sur différentes périodes l’évolution de la vitesse radiale en testant différents pas :
Pas de 1 an, de 10 ans, de 100 ans, de 1000 ans, de 5000 ans.
Cela permettra de lieux comprendre ce que signifie « l’échelle de temps n’est pas trop grande. » de la propriété 2.

- Évolution de la vitesse radiale
Les années se comptent à partir de l’année 2000.
Ainsi le temps écoulé en 1990 est égal à -10 alors qu’en 2010 il est égal à 10.
Rappels mathématiques en vue d’établir la propriété 3
Les vecteurs sont définis dans une base $\mathcal{R}_{0}$.
Dérivée d’un produit scalaire de vecteurs
$$ \dfrac{\mathrm{d}\left( \overrightarrow{V_{1}(u)} \cdot \overrightarrow{V_{2}(u)}\right)}{\mathrm{d}u}=\dfrac{\mathrm{d} \overrightarrow{V_{1}(u)}}{\mathrm{d}u} \cdot \overrightarrow{V_{2}(u)} + \overrightarrow{V_{1}(u)} \cdot \dfrac{\mathrm{d} \overrightarrow{V_{2}(u)}}{\mathrm{d}u} $$
Dérivée d’un vecteur de norme euclidienne constante
$\left\Vert \overrightarrow{V(u)} \right\Vert ^{2}= Cte = \overrightarrow{V(u)}\cdot \overrightarrow{V(u)}$
$$ 0 = \dfrac { \mathrm{d} \left( \overrightarrow{V(u)} \cdot \overrightarrow{V(u)} \right) } { \mathrm{d}u } = \dfrac { \mathrm{d} \overrightarrow{V(u)} } { \mathrm{d}u } \cdot \overrightarrow{V(u)} + \overrightarrow{V(u)} \cdot \dfrac{ \mathrm{d}\overrightarrow{V(u)} } { \mathrm{d}u } = 2 \dfrac { \mathrm{d} \overrightarrow{V(u)} } { \mathrm{d}u } \cdot \overrightarrow{V(u)} $$
Ainsi $\dfrac{\mathrm{d} \overrightarrow{V(u)}}{\mathrm{d}u}\cdot \overrightarrow{V(u)}=0$
et les vecteurs $\dfrac{\mathrm{d} \overrightarrow{V(u)}}{\mathrm{d}u}$ et $\overrightarrow{V(u)}$ sont orthogonaux.
Ce résultat s’applique en particulier à un vecteur unitaire.
Propriété 3 :
$d_1$ désigne la distance du Soleil à l’étoile à l’instant $t_1$.
$d_2$ désigne la distance du Soleil à l’étoile à l’instant $t_2$.
$d_2-d_1 = (t_2-t_1)\overrightarrow{V_{S}}\cdot\overrightarrow{u}\quad$ (1)
Considérons à présent une étoile E animée d’une vitesse $\overrightarrow{V_{S}}$ par rapport à un système d’axes liés au Soleil ( le repère de Kepler).
Nous supposerons que cette vitesse $\overrightarrow{V_{S}}$ est très petite devant la vitesse de la lumière, ce qui permet de rester dans le cadre galiléen.
Démonstration :
Posons $d_1 = \text{ES}(t_1)$ $d_2= \text{ES}(t_2)$ et $f(t) = \text{ES}(t)$ $t_1$ et $t_2$ sont deux instants.
Soit $\overrightarrow{u}$ un vecteur unitaire de la ligne de visée Soleil/étoile choisi arbitrairement du Soleil vers l’étoile.
Soit $\overrightarrow{V_{S}}$ le vecteur vitesse de l’étoile par rapport au Soleil muni du référentiel de Kepler.
Commençons par raisonner sur deux instants très proches $t_1$ et $t_2$ .
$t_1 \approx t_2$
$f(t) = \text{E}(t)\text{S}$
$d_2-d_1 \approx (t_2-t_1)f’(t_1)$
$f’(t) = \dfrac{\mathrm{d}\text{SE}(t)}{\mathrm{d}t}$
$\overrightarrow{V_{S}} = \dfrac{\mathrm{d}\overrightarrow{\text{E}(t)\text{S}}}{\mathrm{d}t} = - \dfrac{\mathrm{d}\overrightarrow{\text{SE}(t)}}{\mathrm{d}t} $
D’après les rappels mathématiques précédents on peut alors écrire :
$\overrightarrow{V_{S}}\cdot \overrightarrow{u} = - \dfrac{\mathrm{d}\overrightarrow{\text{SE}(t)}}{\mathrm{d}t} \cdot \overrightarrow{u} = - \dfrac{\mathrm{d}\overrightarrow{\text{SE}(t)}\cdot \overrightarrow{u}}{dt} $
$\overrightarrow{\text{SE}(t)}\cdot \overrightarrow{u} = -\text{SE}(t)$ à cause du choix fait pour $\overrightarrow{u} $.
$\overrightarrow{V_{S}}\cdot \overrightarrow{u} = \dfrac{\mathrm{d}\text{SE}(t)}{\mathrm{d}t} $
D’où $d_2-d_1 \approx (t_2-t_1)f’(t_1) \approx (t_2-t_1)\overrightarrow{V_{S}}\cdot\overrightarrow{u}\quad$ (1)
Par définition $\mathbf{\overline{V_{S}/r} = \overrightarrow{Vs}\cdot \overrightarrow{u}}$ est la mesure algébrique de la vitesse radiale de l’étoile à l’instant $t_1$. Posons $\overline{Vr} = \overline{V_{S}/r}$
Or la propriété [bleu]7/P2[/bleu] nous dit que le vecteur vitesse radiale de l’étoile par rapport au Soleil est quasi constant si la période envisagée n’est pas trop importante d’où en décomposant l’intervalle de temps $t_2-t_1$ en une succession d’intervalles de temps infinitésimaux sur lesquels on considère que la vitesse radiale est quasi constante, la relation [bleu](1)[/bleu] reste valable.
En effet, décomposons un intervalle T en une succession de $\delta t$ :
$$ \begin{array}{ccc} d_1 - d_0 & = & \delta t \overline{Vr}\\ d_2 - d_1 & = & \delta t \overline{Vr}\\ &\cdots&\\ d_n - d_{n-1} & = & \delta t \overline{Vr} \end{array} $$
Additionnons membre à membre, on obtient : $d_n - d_{0} = n \delta t \overline{Vr} = T \overline{Vr}$
Nous aurons à nous servir de cette propriété pour déterminer l’évolution des coordonnées stellaires par le calcul différentiel (calcul des petites variations) et aussi pour calculer la distance d’une étoile à la terre.
8) Calcul de coordonnées pour un équinoxe donné.
Le paragraphe sur la précession des équinoxes nous a montré que les éléments qui nous permettent de situer une étoile sur la sphère céleste ne restent pas constants dans le temps comme par exemple l’obliquité de l’écliptique ou l’axe moyen de la Terre qui décrit un cône en presque 26 000 ans.
Il nous faut donc lorsque l’on veut préciser les coordonnées d’une étoile définir le système de coordonnées que l’on va utiliser en précisant le moment auquel on veut rapporter ses coordonnées d’où l’expression « pour un équinoxe donné ».
L’équateur moyen a déjà été défini comme le plan perpendiculaire à l’axe moyen et passant par le centre de la Terre.
L’autre plan à considérer sera celui de l’écliptique à l’instant t dont le point vernal, on dit encore l’équinoxe moyen considéré sera l’une des intersections de ce plan écliptique de l’instant t avec l’équateur moyen.
Nous dirons par exemple :
Calculons les coordonnées de Sirius à différentes époques connaissant les coordonnées de Sirius à l’époque standard :
J2000.0 = 1er janvier 2000 à 12h UT
Cela signifie que l’on va calculer les coordonnées moyennes de cette étoile par rapport aux plans fondamentaux du 1er janvier 2000 à 12 h UT.
De nombreuses méthodes existent selon le degré de précision souhaité.
Certaines ne donneront une approximation satisfaisante que si la période envisagée n’est pas trop étalée dans le temps, d’autres tout à fait rigoureuses sans limitation dans le temps sortent du cadre de cet exposé.
Parmi les méthodes que nous allons étudier, il y en a deux tout à fait abordables :
- L’utilisation de la proportionnalité
- L’utilisation de la vitesse radiale qui utilise le calcul différentiel et exige que l’on se limite dans le temps au risque d’avoir une précision notablement dégradée.
a) L’utilisation de la proportionnalité
Il s’agit d’appliquer aux composantes du mouvement en ascension et en déclinaison le principe de proportionnalité qui fournit si la période envisagée n’est pas trop grande une approximation satisfaisante(consulter au paragraphe 8/b le tableau 30 ).
Sur un an, la composante en déclinaison est : $\mu_{\delta}$
Sur un an, la composante en ascension est : $\mu_{\alpha}$
Si T est un temps exprimé en années, les deux composantes seront respectivement :
$\Delta_{\delta} = T \mu_{\delta}$ et $\Delta_{\alpha} = T \mu_{\alpha}$
Ces deux composantes seront à rajouter aux coordonnées en déclinaison et en
ascension. De sorte que les nouvelles coordonnées $\alpha’$
et$\delta’$ seront :
$\alpha’ = \alpha + \Delta_{\alpha} \quad \delta’ = \delta + \Delta_{\delta}$
b) Méthode de la vitesse radiale
Ce paragraphe est un développement du paragraphe « motion in space » du livre « Astronomical Algorithms » de Jean Meeus(seconde édition, p141).
Définissons le repère rectangulaire associé aux coordonnées équatoriales de l’étoile E.

- figure 29
On fait toujours référence à la position héliocentrique de l’étoile sur la sphère céleste héliocentrique ou à la direction héliocentrique de l’étoile sur la sphère céleste géocentrique comme expliqué en 4/a.
V désigne le point vernal noté traditionnellement $\gamma$.
Soit O le centre de la Terre.
Posons r= distance de l’étoile, $\alpha$ son ascension droite, $\delta$ sa déclinaison.
Si $\delta$ et $\alpha$ désignent les coordonnées équatoriales de l’étoile, le passage des coordonnées équatoriales aux coordonnées rectangulaires nous
permet d’écrire :
$$\left\lbrace \begin{array}{l} x = r \cos \delta \cos \alpha = f(\alpha,\delta,r)\\ y = r \cos \delta \sin \alpha = g(\alpha,\delta,r)\\ z = r \sin \delta = h(\alpha,\delta,r) \end{array} \right.$$
→ Nous supposerons que $\Delta\alpha = \mu_{\alpha}$ et $\Delta\delta = \mu_{\delta}$ sont de toutes petites variations par rapport à $\alpha$ et $\beta$.
→ Nous supposerons aussi que la vitesse radiale varie très peu sur la période envisagée. Le classeur Excel intitulé « Évolution de la vitesse radiale » donne une idée de la dégradation de la vitesse radiale en fonction du temps.
Nous allons utiliser la différentielle des fonctions à plusieurs variables $f$, $g$ et $h$.
| $\dfrac{\partial f}{\partial \alpha}=- r \cos \delta \sin \alpha$ | $\dfrac{\partial f}{\partial \delta}=- r \sin \delta \cos \alpha$ | $\dfrac{\partial f}{\partial r}=\cos \delta \cos \alpha$ |
| $\dfrac{\partial g}{\partial \alpha}=r \cos \delta \cos \alpha$ | $\dfrac{\partial g}{\partial \delta}=- r \sin \delta \sin \alpha$ | $\dfrac{\partial g}{\partial r}=\cos \delta \sin \alpha$ |
| $\dfrac{\partial h}{\partial \alpha}=0$ | $\dfrac{\partial h}{\partial \delta}=r\cos\delta$ | $\dfrac{\partial h}{\partial r}=\sin\delta$ |
$ \begin{eqnarray*} \Delta x &=& \dfrac{\partial f}{\partial r}(\alpha,\delta,r)\Delta r + \dfrac{\partial f}{\partial \delta}(\alpha,\delta,r)\Delta \delta + \dfrac{\partial f}{\partial \alpha}(\alpha,\delta,r)\Delta \alpha\\ &=& \left(\dfrac{x}{r}\right)\Delta r - z\Delta\delta\cos\alpha-y\Delta\alpha \end{eqnarray*} $
$ \begin{eqnarray*} \Delta y &=& \dfrac{\partial g}{\partial r}(\alpha,\delta,r)\Delta r + \dfrac{\partial g}{\partial \delta}(\alpha,\delta,r)\Delta \delta + \dfrac{\partial g}{\partial \alpha}(\alpha,\delta,r)\Delta \alpha\\ &=& \left(\dfrac{y}{r}\right)\Delta r - z\Delta\delta\sin\alpha+x\Delta\alpha \end{eqnarray*} $
$ \begin{eqnarray*} \Delta y &=& \dfrac{\partial h}{\partial r}(\alpha,\delta,r)\Delta r + \dfrac{\partial h}{\partial \delta}(\alpha,\delta,r)\Delta \delta + \dfrac{\partial h}{\partial \alpha}(\alpha,\delta,r)\Delta \alpha\\ &=& \left(\dfrac{z}{r}\right)\Delta r +r\Delta\delta\cos\delta \end{eqnarray*} $
D’après 7/P3/(1) on a :
$$ \Delta r = \left( t_2-t_1 \right) \overrightarrow{Vs}\cdot\overrightarrow{u} = \Delta t \overline{Vr} $$
Autrement dit si $\Delta t = 1$ alors , $\Delta r =\overline{Vr}$.
Remarque : $\overline{Vr}$ est supposé quasi constant en vertu de [bleu ciel]7/P2[/bleu ciel] si l’échelle de temps n’est pas trop grande.
Soit T le temps écoulé depuis un instant $t_0$ qui est négatif pour le passé et positif pour le futur.
Si l’on pose $\overrightarrow{U}\left\lbrace \begin{array}{l}\Delta x\\ \Delta y\\ \Delta z\end{array}\right.$, $E\left\lbrace \begin{array}{l} x\\ y\\ z\end{array}\right.$ , $E’\left\lbrace \begin{array}{l} x’\\ y’\\ z’\end{array}\right.$ .
$\overrightarrow{U}$ est supposé quasi constant si l’échelle de temps n’est pas trop grande.
On a : $ \overrightarrow{\text{EE’}}=\text{T}\overrightarrow{U}$
et donc : $\left\lbrace \begin{array}{l}x’=x+\text{T}\Delta x\\ y’=y+\text{T}\Delta y\\z’=z+ \text{T}\Delta z\end{array}\quad \color{blue}\textbf{(1)}\right.$.
Soient $\alpha’$ et $\delta’$ les nouvelles coordonnées équatoriales,
alors
$$ \left\lbrace \begin{array}{l} \tan \alpha’ = \dfrac{y’}{x’}\quad \color{blue}\textbf{(2)}\\ \tan\delta’= \dfrac{z’}{\sqrt{x’^{2}+y’^{2}}} \quad \color{blue}\textbf{(3)} \end{array} \right. $$
Remarque : comme $y’ = r \cos\delta’\sin\alpha’$, le signe de $\sin\alpha’$ est le même que celui de $y’$.
Cette remarque permet de retenir ou de modifier convenablement la valeur fournie par Arctan.
Les paramètres astrométriques suivants permettent l’établissement du tableau 30 à différentes époques connaissant les coordonnées de Sirius à l’époque standard :
| J2000.0 = 1er janvier 2000 à 12h UT = JD2451545.0. |
| $\alpha_{2000}=6 \text{h} 45 \text{min} 8,871 \text{s}=101,286962^{\circ}$ |
| $\delta_{2000}=-16^{\circ}42’57,99’’ = -16,716108^{\circ}$ |
| Distance= 2,64 parsecs |
| Vitesse radiale $Vr = -7,6 \text{km/s}$ |
| Mouvement propre en ascension = -0,03847 s (seconde de temps) |
| Mouvement propre en déclinaison = -1,2053 seconde d’arc |
Conversion
Convertissons les composantes du mouvement propre en rad/an.
|
$$ \begin{array}{c} \text{Mouvement propre en ascension en rad/an}\\ =\\ \text{Mouvement propre en ascension en}\dfrac{\textbf{s/an}}{\mathbf{13 751}} \end{array} $$ |
|
$$ \begin{array}{c} \text{Mouvement propre en déclinaison en rad/an}\\ =\\ \text{Mouvement propre en déclinaison en}\dfrac{\textbf{seconde d’arc/an}}{\mathbf{206 265}} \end{array} $$ |
|
$$ \begin{array}{c} \text{La vitesse radiale }Vr\text{ en parsec par an}\\ =\\ \text{La vitesse radiale }Vr\dfrac{\textbf{km/s}}{\mathbf{977 792}} \end{array} $$ |
Calculons à présent les coordonnées en l’an 1000.
Dans le tableau suivant, nous avons mis -1000 dans la cellule « temps en année ».
Cela signifie que nous sommes en l’an 1000 par rapport à l’année 2000.
Remarque : Le calcul suivant suppose que nous faisons référence à un même équinoxe (en l’occurrence dans note exemple J2000.0 ) . Le passage d’’un équinoxe à l’autre sort du cadre de notre exposé.

- tableau 30
- D’après Astronomical algorithms de J. Meeus
Using uniform proper motion = méthode de proportionnalité
Motion in space = méthode de la vitesse radiale que nous venons d’exposer.
La méthode de proportionnalité utilise le fait que les composantes du mouvement propre en ascension et en déclinaison évoluent de manière proportionnelle dans le temps .
Voici ce que nous dit J.Meeus à propos des deux méthodes :
« La méthode des vitesses radiales ne peut être valable infiniment mais reste plus précise que la méthode classique de proportionnalité sur une période de plusieurs millénaires.
Une extrême précision ne peut être obtenue du fait que les résultats dépendent de la distance et de la vitesse radiale adoptées.
La méthode utilisant la proportionnalité est bonne pour les époques modernes. Entre 1900 et 2100, l’erreur sur la déclinaison de Sirius ne dépasse pas 0,04 secondes d’arc. »
9) L’outil vitesse radiale pour évaluer la distance de l’observateur- étoile ou étoile-Soleil
a) La distance étoile-Soleil est voisine de la distance étoile-Terre
Appelons EST le triangle formé par l’étoile, le Soleil et la Terre.
Nous savons que la parallaxe des étoiles est inférieure à 1 seconde d’arc.
De plus, la parallaxe est la valeur maximale de l’angle $\widehat{\text{SET}}$.
Posons $d = \text{ET}$, $x = \text{ST}$. L’unité de distance étant l’unité astronomique UA.
D’après le théorème d’Al Kashi, on a puisque $\cos\left(\widehat{\text{SET}}\right)$ voisin de 1 :
$1=d^{2}+x^{2}-2 d x $ d’où $d^{2}-2 d x+x^{2}-1=0 $ et $\Delta =1$
L’équation admet deux racines exprimées en UA :
|
$$ x=d\pm\dfrac{1}{2}\quad\color{blue}\textbf{(1)} $$ |
Ainsi la distance Terre-étoile diffère de la distance Soleil-étoile de la moitié de l’unité astronomique. C’est en ce sens que nous dirons que la distance Terre-étoile est voisine de la distance Soleil-étoile.
b) Calcul de la distance Terre-étoile
Comme nous l’avons vu dans l’article intitulé « La lumière messagère des étoiles : la distance Terre Soleil » paru dans MathemaTICE N°62 - Novembre 2018 , une étoile peut tantôt se rapprocher de la Terre tantôt s’en éloigner. Le calcul a été fait pour l’étoile Arcturus de la constellation du Bouvier.
L’étoile en bleu progresse de A vers B. En B elle est à une distance de la Terre plus grande que lorsqu’elle était en A mais son parcours est associé alternativement à une diminution et augmentation de distance par rapport à la Terre.

- figure 31
La distance Terre-étoile pour le logiciel est exprimée en cm mais on peut très bien remplacer cette unité par n’importe quelle unité astronomique.
Aller sur le bandeau de Cabri 3d.

- figure 34
- Aller sur Window et choisir animation puis sur la petite flèche entourée en vert.
- Clic gauche sur manipulation puis clic gauche sur le point Terre avec la vitesse 12.
- Clic gauche sur manipulation puis clic gauche sur le point étoile en bleu avec la vitesse 2.
D’après la propriété 7/P3/[bleu ciel](1)[/bleu ciel] $d_{2}-d_{1}=\left(t_{2}-t_{1}\right)\overrightarrow{V_{S}}\cdot\overrightarrow{u}$
$d_{1}$ et $d_{2}$ distance de l’étoile au Soleil.
$\overrightarrow{u}$ dirigé du Soleil vers l’étoile et $\overrightarrow{V_{S}}$ vitesse de l’étoile par rapport au Soleil.
Nous assimilerons la distance Terre-Soleil à la distance Terre-étoile d’après 9/a/[bleu](1)[/bleu]
→ Supposons connues la distance en parsec et la vitesse $\overline{V_{r}}$ en km/s.
Supposons $d_{1}$ connue la distance initiale en parsec.
|
$$ \overline{V_{r}}\text{(en parsec/an)}=\dfrac{\overline{V_{r}}\text{(en km/s)}}{977 792} $$ |
donc si $t_{2}-t_{1}$ est exprimée en années et $d_{2}$ en parsecs alors :
|
$$ d_{2}=d_{1}+\left(t_{2}-t_{1}\right)\times\dfrac{\overline{V_{r}}\text{(en km/s)}}{977 792}\quad \color{blue}\textbf{(1)} $$ |
→ Supposons connues la distance en année lumière (al) et la vitesse $\overline{V_{r}}$ en km/s.
$t_{2}-t_{1}$ est exprimée en années
|
$$ d_{2} = d_{1}+\left(t_{2}-t_{1}\right)\times\overline{V_{r}}\times\dfrac{3,33}{10^{6}}\quad \color{blue}\textbf{(2)} $$ |
Exemple :
l’étoile Dubhé a une vitesse radiale de -8,8 km/s.
Sa distance actuelle vaut 123,6 al. Alors d’après la formule [blue](2)[/blue] sa distance dans 100 000 ans sera 120,6 al.